
盖世汽车讯 机器人正在逐步获取人类的本能,例如感知热量、压力,乃至物体的重量。据外媒报道,美国南加州大学维特比学院(USC Viterbi)的一支学生团队,在计算机科学系助理教授Daniel Seita的指导下,成功研发了一款名为“MOTIF Hand”的机械手。
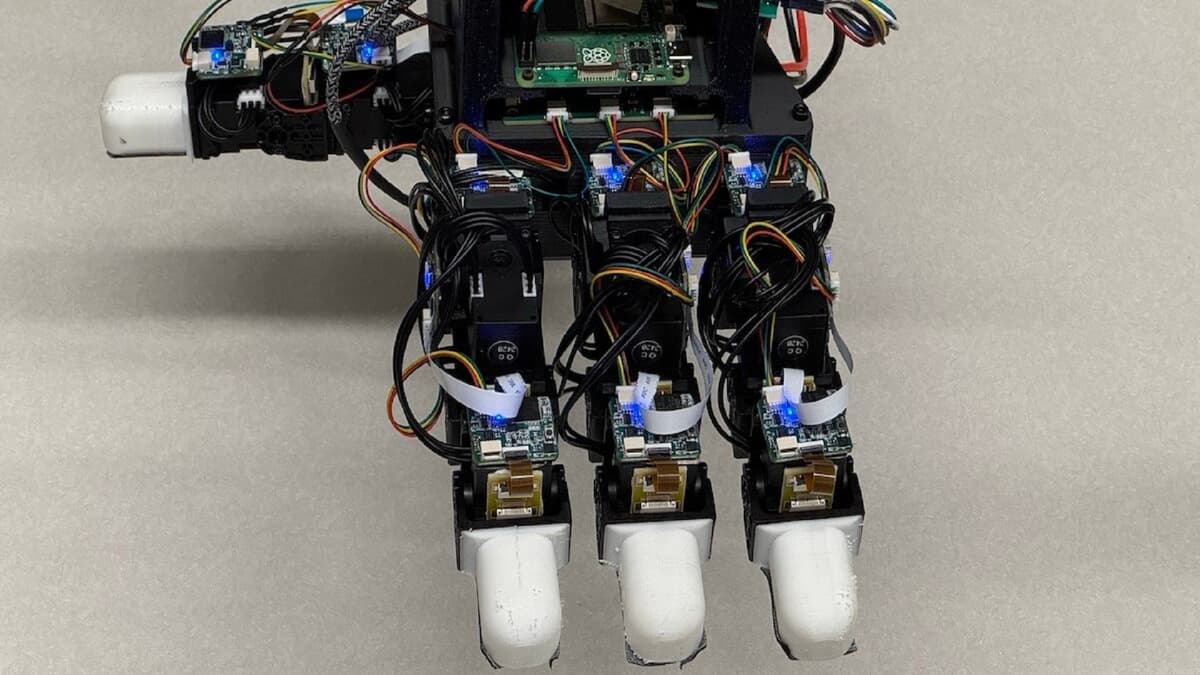
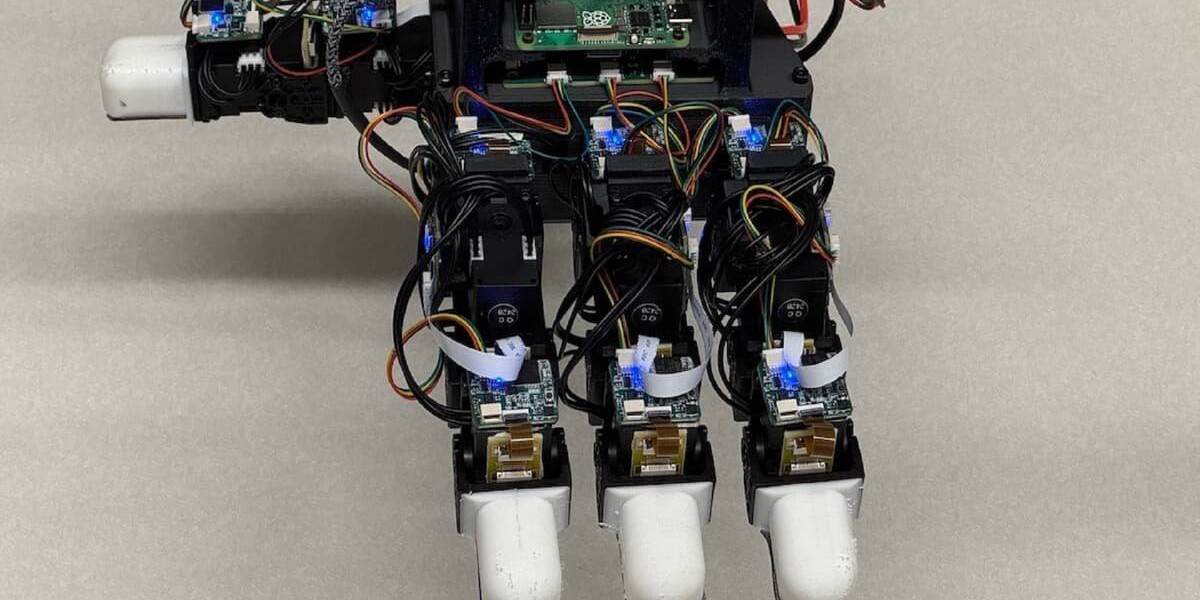
机械手(图片来源:南加州大学维特比学院)
该款机械手的设计旨在模仿人类与外部世界的互动方式,因此配备了能够感知力量、温度和运动的传感器,标志着在提升机器人操作直观性方面迈出了重要一步。
设计巧妙,反应灵敏
与传统的机械手不同,MOTIF Hand具备多模态特性,能够同时采集并响应多种类型的感官信息输入,包括压力、温度,甚至运动。此类感知能力让该机械手在执行某些原本难以自动化的任务时,做出更为自然和精准的反应,例如判断推动物体或避开高温表面时所需的力度。
该设计理念源于人类与物体互动的方式。自孩提时代起,人类便学会了判断提起一个箱子所需的力度,以及如何避开热锅。MOTIF Hand的设计也反映了此种思维,其在手掌中嵌入了一台热感摄像头,用于探测热量,类似于人类在直接触碰物体前通过感知温度来做出判断的过程。
此种热感探测完全无需接触(即可感知温度)。只需将MOTIF Hand的手掌接近物体,就能读取温度而无需实际接触。该研发团队通过在手掌内部嵌入红外摄像头,实现了该功能,让该机械手拥有了热成像能力。
此外,该机械手还可以通过集成于手指内部的传感器来感知力量,此类传感器让机器人能够以恰到好处的压力来推动物体,此种特性在制造业等对精度要求很高的领域中十分有用。
只感受,无需观察
在感知物体重量方面,该机械手采用了一种出人意料的方式,即通过轻弹或摇晃物体以及感知物体内部情况来感受重量,与人类感知水瓶重量时类似。
研究人员指出:“作为人类,我们无法仅凭视觉感知力量,而需要通过触觉来感受。例如,若不确定一个水瓶是否装满水,我会轻敲瓶身来判断。”MOTIF Hand的设计灵感源自卡内基梅隆大学(Carnegie Mellon)于2023年研发的LEAP Hand。鉴于LEAP Hand采用了开源设计,MOTIF Hand也沿用了这一设计理念。研究团队期望此举能够推动机器人领域的合作与发展。