本文转自:生活报
科研成果登上国际学术顶刊
哈工程“机器鱼”可探秘4000米深海

生活报讯 (记者吕晓艳) 在4070米水深的幽暗海山区,一条全身质地柔软的“鱼”在灵活巡弋……近日,国际学术顶刊《科学·机器人》杂志发表哈尔滨工程大学李国瑞教授课题组的最新研究进展,该课题组联合相关团队历经多年探索,研制出了电液驱动深海软体机器人,并在1369米深度冷泉区和4070米深度海山区等多个海域开展了探测应用成果。
从经典物理定律中获得灵感 启动深海装备设计
深海是人类探索生命起源、资源勘探和气候演化等关键问题的前沿领域。然而,解锁这片幽暗深渊的征途,却面临着严峻挑战。2022年,该课题组从“电致流动”这一经典物理现象中获得启发,启动了电液驱动深海软体机器人的研究,是经典物理定律在深海极端条件下装备设计的创新拓展。
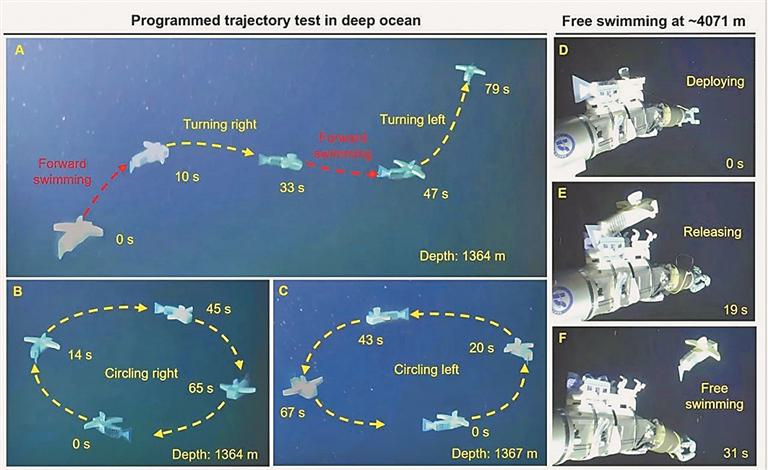
团队研制的新一代深海软体机器人长约32cm,翼展宽约18cm,重量约670g,内部的控制电路、传感器、电池等元件被融入集成在软体机身中,无需耐压外壳便能承受全海深静水压力。机器人通过自身携带的小型化能源控制系统实现电液单元协同驱动,当软基体中的电子器件产生高压电信号时,柔性电液单元会在电压信号的激励下产生类似流体静力骨骼的变形模式,使其在深海环境下实现直行、转弯等多种轨迹路径。此外,该软体机器人集成了微型深海光学感知系统,可以在深海极端环境下完成对自身运动状态、环境目标的实时感知,使小尺度软体机器人具备深海近底感知能力。
复杂轨迹运动、自主姿态调控 成功通过多次严苛考验
在研究历程中,系列的理论计算和环境实验已经验证了机器人在高压低温极端环境下的驱动、推进、感知能力。为进一步证实在深海实地环境探测作业的可靠性,深海软体机器人先后在中国南海的海马冷泉区、海山区等海域开展了一系列海试验证。
2024年6月13日深夜,团队研制的深海软体机器人在南海3176米深度完成布放。海试影像记录显示,该机器人在深海复杂水流环境下完成了复杂轨迹运动、近底感知探测、自主姿态调控、返航等系列任务,证实了软体机器人在深海极端压力和复杂流动环境下的可靠机动性和感知能力。2024年7月4日至6日,该深海软体机器人在海马冷泉区完成了多次布放,成功实现了约1369米深海环境下的低扰动探测任务。2024年7月9日,机器人搭载“海星”号6000米级深海ROV,在约4070米深度的海山区开展了航行试验,探索了深海潜水器和小型深海软体机器人协同作业,实现大范围、低扰动深海探测的可行性。
此外,为进一步验证该软体机器人与水下环境的生态融合特征,课题组针对该软体机器人开展了海洋生态环境和群落的原位、近距离行为观测。“历经多次海试的严苛考验,该软体机器人展现出良好的机动性、可靠的极端环境适应性和低扰动探测能力,有望为深海生态观测提供可持续的技术路径和方法革新。”核心成员沈鹏博士说。
图片由哈工程提供