2025世界机器人大会正在北京举行,在现场,记者看到了一系列围绕具身智能大脑的创新应用。
聪慧具身大脑助力机器人“心灵手巧”
机器人是不是能干活儿,取决于它是不是有一个聪明的具身大脑,可以实现对工作任务和执行动作的理解。事实上,它像我们人类一样,在学习的时候会收集各种真实工作场景的各类数据信息进行训练,通过具身大模型分析处理后再做出相应的动作。和传统自动化机器人只具备单一功能不同,具身智能机器人可以像我们人类一样,完成不同的任务,除了捡拾垃圾,这个机器人还现场表演起了制作香囊和完成绕线等柔性工作。

感知升级 灵巧手技术加速迭代
世界机器人大会不仅展示了形态丰富的机器人整机产品,也展示了供应链和关键零部件的技术突破和趋势。
总台央视记者 张春玲:这是这次展会上亮相的一个全新的触觉模型,我们可以看到当这个机器手抓握起一个物品的时候,它只需要轻轻地抓握三次,就可以在这边实时生成这个物品的空间形状,而这样的一个数据能够更好地帮助机器人理解真实的物理世界。
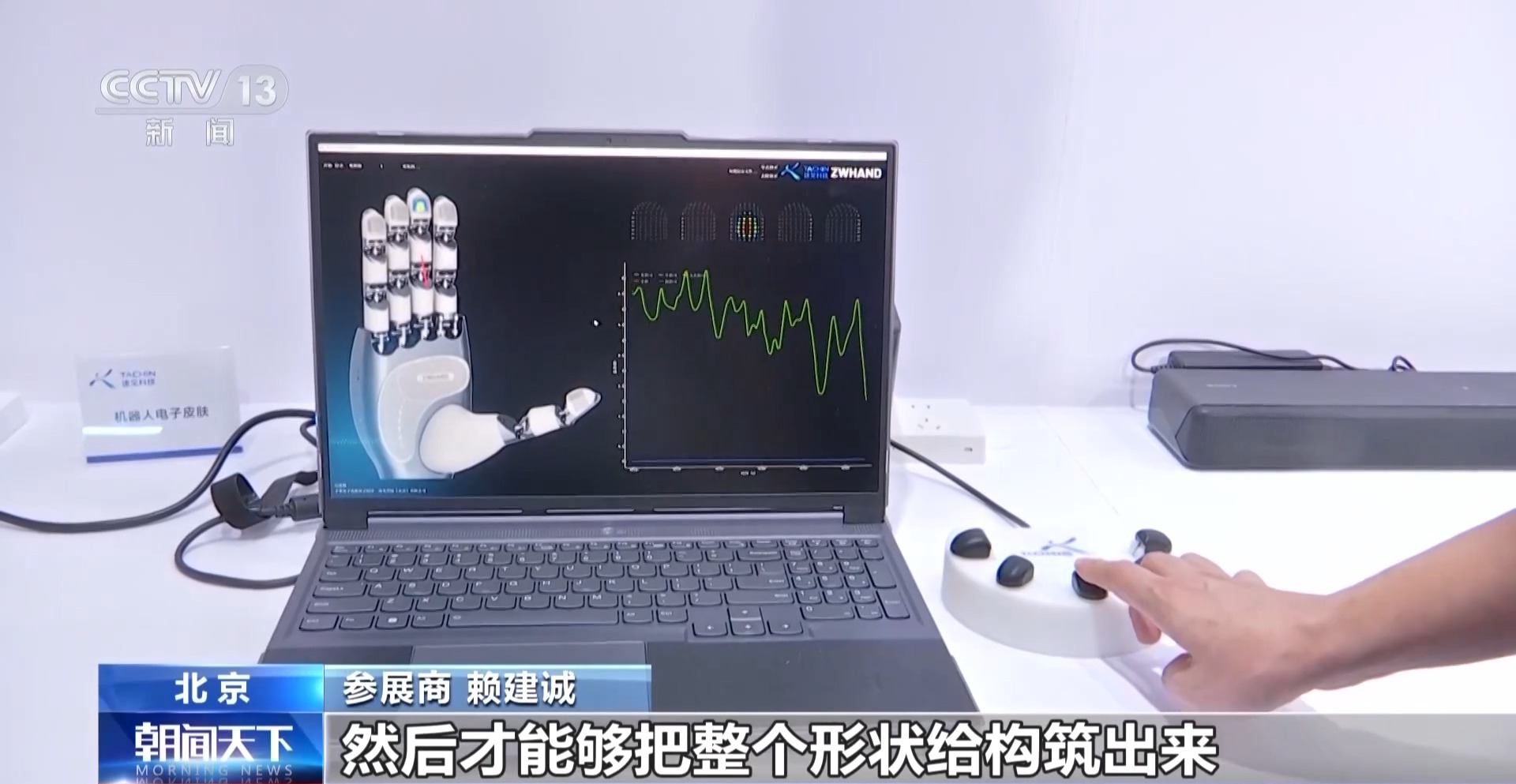

灵巧手作为人形机器人最为关键的组成部分,要具备强大的感知能力,其中最为重要的是要像人类一样具备触觉感知和对力的控制。不同的参展商带来了很多不同技术路线的解决方案,比如这个灵巧手通过在硅胶表面内的微型摄像机,记录材料极其微弱的物理形变,从而推断出类似于触觉的信息。
一个指尖大小的触觉传感器,要能感知出一克物体的压力,同时还要测量和计算出它的材质、粗糙度、柔性等多维度的数据信息,因此制造工艺难度很大,这也导致机器人整只灵巧手的成本是机器人整只成本的近20%。但在今年世界机器人大会上,记者发现,供应链价格发生了很大的变化。像有的指甲盖大小的单一传感器,售价从动辄数千、上万,降至百元量级。

(央视新闻客户端)