





लोकप्रिय लेख
-
 女主播自称留学镀金竟被大哥一眼“识破”द्वारा 无心浪子
女主播自称留学镀金竟被大哥一眼“识破”द्वारा 无心浪子 -
 尼卡音乐_4द्वारा scker plus
尼卡音乐_4द्वारा scker plus -
 唐斯:每次看到爱德华兹表现出色,我都会感到特别自豪द्वारा 笑熬糨糊
唐斯:每次看到爱德华兹表现出色,我都会感到特别自豪द्वारा 笑熬糨糊 -
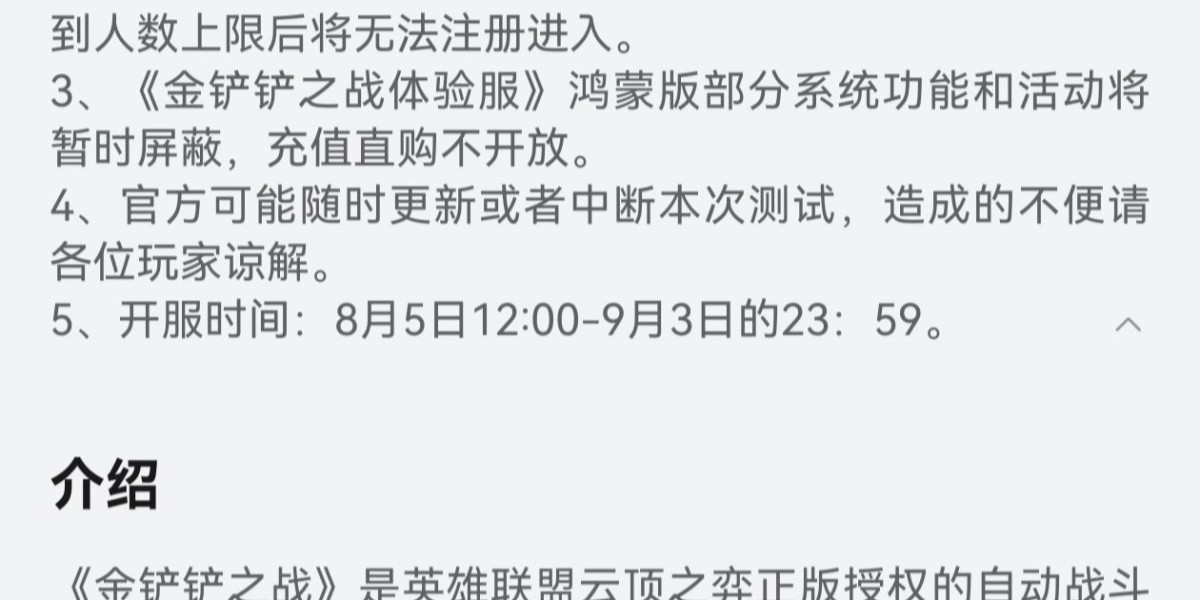 华为游戏中心:腾讯《金铲铲之战》鸿蒙版今年 9 月上线द्वारा 傲娇女神范
华为游戏中心:腾讯《金铲铲之战》鸿蒙版今年 9 月上线द्वारा 傲娇女神范 -
 “被围猎的私密照”:跨境平台上的偷拍交易链|封面深镜द्वारा 有钱没处花
“被围猎的私密照”:跨境平台上的偷拍交易链|封面深镜द्वारा 有钱没处花





